猫除け装置
野良猫の糞害に悩むお客様のために、猫除け装置を開発しました。
猫を傷つけずに糞害を防ぐ手段として、画像認識により猫の位置を検出して、その方向に水鉄砲を射出する方法を選びました。
実際に動作している様子は、以下のビデオをご覧下さい。
ラジコンカーに猫の写真を貼り付けて、それを装置の前で動かしてみました。
水鉄砲の射出角度は上下±20度、左右±45度です。水鉄砲の最大到達距離は7mですが、猫の認識可能最大距離は約5mとなります(成描の場合)。
画像認識には市販の数千円のマイコンを使用しているため、バッテリーの持ちが良く、かつ、ローコストで生産が可能となりました。
今後、市場の反響を見ながら量産体制を整えていく予定です。
特許出願中:特願2016-110456号
2017年1月30日追記
以前、テレビ東京WBS(ワールドビジネスサテライト)で紹介して頂いた弊社の猫除け装置「ニャンナウェイ®」は、猫の顔を認識して水を射出するというものでした。
この方法には、猫が常に装置の方を向いていないと(装置から猫の顔が見えないと)、装置が猫を認識できないという欠点がありました。
この欠点を解消するために、「ニャンナウェイ®」にディープラーニングの技術を取り入れました。
通常のディープラーニングに用いられるものよりも軽いニューラルネットワークを用いることによって、GPUを積んでいないPCでもリアルタイムで処理が出来るようになりました。
また、処理能力の低いARMプロセッサ等でも1秒以内でレスポンスが可能となりました。
以下のビデオは、実際に開発した「猫除け装置用に特化して学習したモデル」を用いて猫の検出を試みた結果です。YouTube上のビデオの一部を使用させて頂きました。
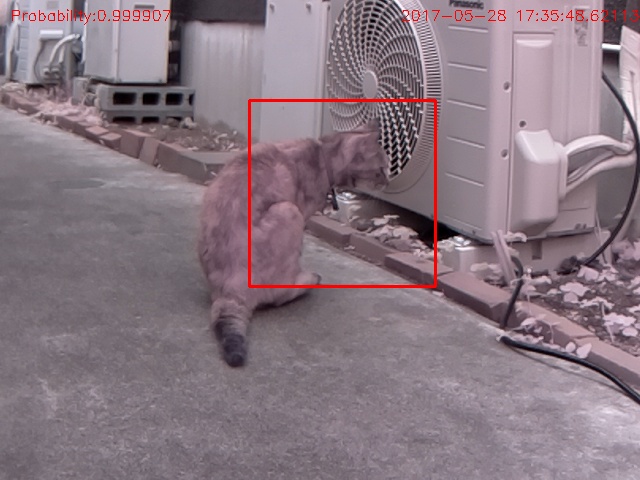
画面上で動きを検出したエリアを対象にディープラーニングによる判別を行っています。緑色の枠は動きを検出したエリアを表しています。赤色の枠は緑色の枠内に猫が検出されたことを表しています。
(オリジナルのYouTube動画はこちら)
猫の顔がカメラの方を向いていなくても猫を検出できています。ちなみに、猫の体の一部しか映っていない場合等は猫と判別できておらず、緑色の枠が表示されています。
一方、犬が映っているビデオに対しても検出を試みたところ、以下のような結果になりました。
(オリジナルのYouTube動画はこちら)
赤色の枠が表示されないことは、猫として検出されていないことを表しています。
犬と猫の判別という比較的難しい判別も、ディープラーニング技術を用いることによって実現することが出来ました。
今後、さらに検出技術をブラッシュアップしていく予定です。
2017年11月16日追記
弊社の画像認識猫除け装置「ニャンナウェイ®」のフィールドテストの結果を紹介させて頂きます。
ニャンナウェイはディープラーニング技術により猫を認識して、猫のいる方向に水鉄砲を射出する猫よけ装置です。
以前、テレビ東京WBS(ワールドビジネスサテライト)で紹介して頂いたもののアップグレード版です。
今回フィールドテストに用いたプロトタイプの外観例は以下のようになります。
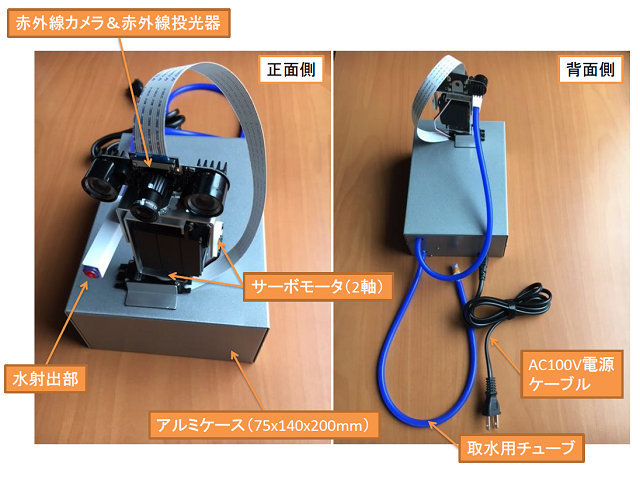
ニャンナウェイプロトタイプ
このプロトタイプを防滴仕様にしたものを屋外に設置しました。
約1年にわたってフィールドテストを実施した結果、猫を正しく検出し(画面上では赤枠で表示)、そちらの方向に照準を向けて(青枠で表示)、水鉄砲を射出することに成功しました。
実際にニャンナウェイ内に保存された画像を動画として再生したものが以下になります。
赤外線カメラを使用しているため、一部モノクロに近い色合いとなっています。
動画ではディープラーニングによる猫の判別をしているときは1秒間隔、それ以外のときは0.2~0.25秒間隔で再生しています。
猫が水鉄砲を避けています。なかなかの強者のようでギリギリで避けてじっと装置を観察しています。
上記のResult1と同じ猫と思われますが、今回は逃げました。
Result2の猫が久しぶりに戻ってきたようですが、再び逃げました。
この後、この場所での糞害が無くなったので装置を撤去することとなりました。
上記Result3の後、2ヶ月ほど装置を撤去していたらまた猫の糞が見られるようになったため装置を再設置したところ、今までとは別の猫が検知されました。
夜間でもニャンナウェイが動作していることが分かる動画です。
また別の猫が検知されました。
これもまた別の猫です。この場所は猫たちにとってお気に入りの場所のようです。
別の場所ですが、再び夜間にニャンナウェイが動作した例です。
(2018/2/9追記)水鉄砲射出前に気配を察知したのか、現場を離れています。
正しく動作する猫除け装置により、猫に「ここは入らないでくださいね」というメッセージを伝えることが出来るようになります。
これにより、猫に対してボウガン等で危害を加えてしまうというような悲しい事件が起こることを避けることが出来ると信じています。
今後も誠心誠意開発を続けて参ります。
※ニャンナウェイ は株式会社最先端研究開発支援センターの登録商標です。