弊社代表取締役安田が開発したMRI装置内で使用可能な2軸の力センサを用いたATR脳情報通信総合研究所の藤原祐介さんの研究成果がScientific Reports誌に掲載されました(肩書きは論文投稿当時のものです)。
Scientific Reports s41598-017-14579-3 Fig.1
普段私たちは特に関節の動きを意識することなく物を掴むことが出来ますが、例えば、これをロボットにやらせようとすると物の3次元空間での座標を各関節の座標系に変換してモータを動かすという複雑な計算処理を行う必要があります。
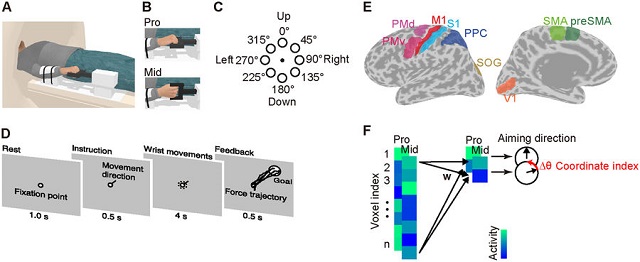
この研究では図Bのように手首の回転角度が90度異なる状態でハンドルを握り、それぞれの状態で8方向(図C)へ手首の曲げ運動を行ったときの脳の活動をMRI装置によって記録しました。MRI装置によって計測されたデータを分析することによって、脳のどの場所でどのような座標変換が行われているかが明らかになりました。
これにより、身体運動に関する脳の複雑な処理の一部が明らかにされたため、今後ロボット等に応用することによりロボット等がよりスムーズな動きが出来るようになることなどが期待されます。
今後も弊社は最先端の研究開発の支援を積極的に行って参ります。