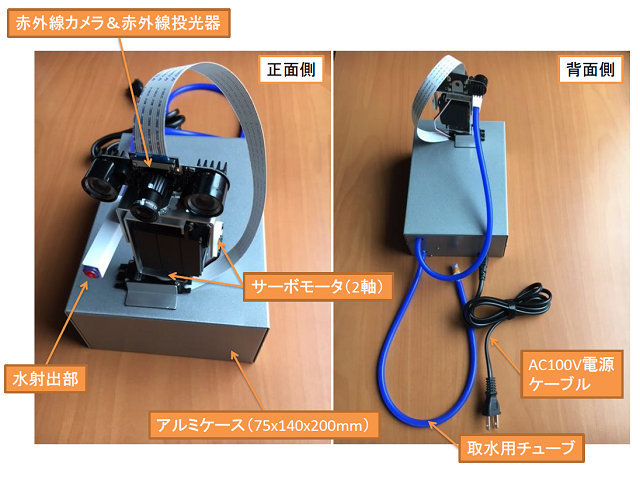
この度、弊社では猫にマナーを教える装置「マニャーdeシュ!」の製品版を完成させました。
「マニャーdeシュ!」はテーブルや台所の調理台等、猫に乗って欲しくない場所を猫に教える装置です。
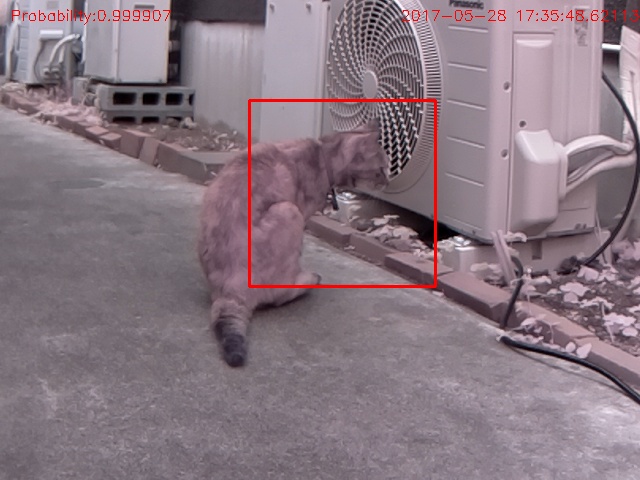
内蔵のAIカメラにより約1秒間に1回の頻度で猫が映っているかどうか判別します。
猫が映っていた場合は音声による警告をします。
一定回数連続して警告しても猫が居続けた場合、水を噴霧します。
バッテリーで稼働し、ポータブルにどこでも設置できます。
噴霧する水はナチュラルミネラルウォーターの「エビアン フェイシャルスプレー」を使用しますので、無害です。
利用方法・操作方法
安定した平らな面に「マニャーdeシュ!」を設置して電源スイッチを入れて下さい。およそ1分で起動が完了し、猫認識がスタートします。カメラの視界に猫が入ると距離にかかわらず猫を認識してしまいますので、設置位置を工夫して下さい。
バッテリーはケース上部のUSB端子(Micro−B)から充電できます。充電器およびケーブルはお客様がお持ちのものをご使用下さい。フル充電で約12時間稼働します。

スプレーの水は1度の噴霧で0.5mlほど射出されます。約1m水が飛びますので、濡れて困る家電製品などが「マニャーdeシュ!」の噴霧方向に存在しないように注意して下さい。水がなくなった場合は市販の「エビアン フェイシャルスプレー(50ml)」と交換して下さい。
実際に「マニャーdeシュ!」を動作させた例は以下の動画をご覧下さい。
「マニャーdeシュ!」が猫には反応して犬には反応しない例(共にぬいぐるみ対象)は以下の動画をご覧下さい。
製品仕様
- サイズ:高さ25cm、幅8.5cm、奥行16cm(突起部含まず)
- 重さ:1.2kg
- 保証期間:6ヶ月(6ヶ月の保証期間内の不具合については、無償で修理対応させて頂きます)
- 動作温度/湿度:10~30℃/20~80%(結露無し)
- AI誤認識率:猫ではないのに猫と誤認識する率=約1%、猫なのに猫と認識しない率=約10%(ランダムに集めた1,000枚の犬と猫の写真に対して行った試験結果です)
使用上の注意
「マニャーdeシュ!」内蔵のAIによる猫認識は上記の通り一定の誤認識を含みます。誤認識によるお客様の所有物への損害等に関して弊社は一切責任を負えませんのでご了承下さい。設置の際は誤認識が起こりうることを想定して場所の選定をお願い致します。
また、当装置は設置した場所に猫が上らなくなることを保証するものではありません。猫の個性によって効果は異なりますので水噴霧に対する猫の反応を確認・考慮の上お使い下さい。
ご注文方法
現在、「マニャーdeシュ!」は受注生産で製造しております。そのため、正式発注から納品までは1ヶ月ほどかかります。
価格は49,800円(税抜)となります。
ご発注の際は、まず以下の問い合わせフォームから問い合わせをお願い致します。
https://www.saisentan.co.jp/contact/