この度、弊社代表取締役安田の執筆した本「マイニングやNFTを無料で本格運用できるブロックチェーンを作る! 」が秀和システムより出版されました。
これ1冊でブロックチェーンを作りながら学べるようになっています。しかも400行程度のスクリプトで、安価に(場合によっては無料で!)、NFTを含むブロックチェーンの稼働までできるようになります。電子署名とハッシュ関数で改ざんを防止しながら、安価な継続利用や性能向上の方法も解説しています。
書店でお手にとって頂けましたら幸いです。
この度、弊社代表取締役安田の執筆した本「マイニングやNFTを無料で本格運用できるブロックチェーンを作る! 」が秀和システムより出版されました。
これ1冊でブロックチェーンを作りながら学べるようになっています。しかも400行程度のスクリプトで、安価に(場合によっては無料で!)、NFTを含むブロックチェーンの稼働までできるようになります。電子署名とハッシュ関数で改ざんを防止しながら、安価な継続利用や性能向上の方法も解説しています。
書店でお手にとって頂けましたら幸いです。
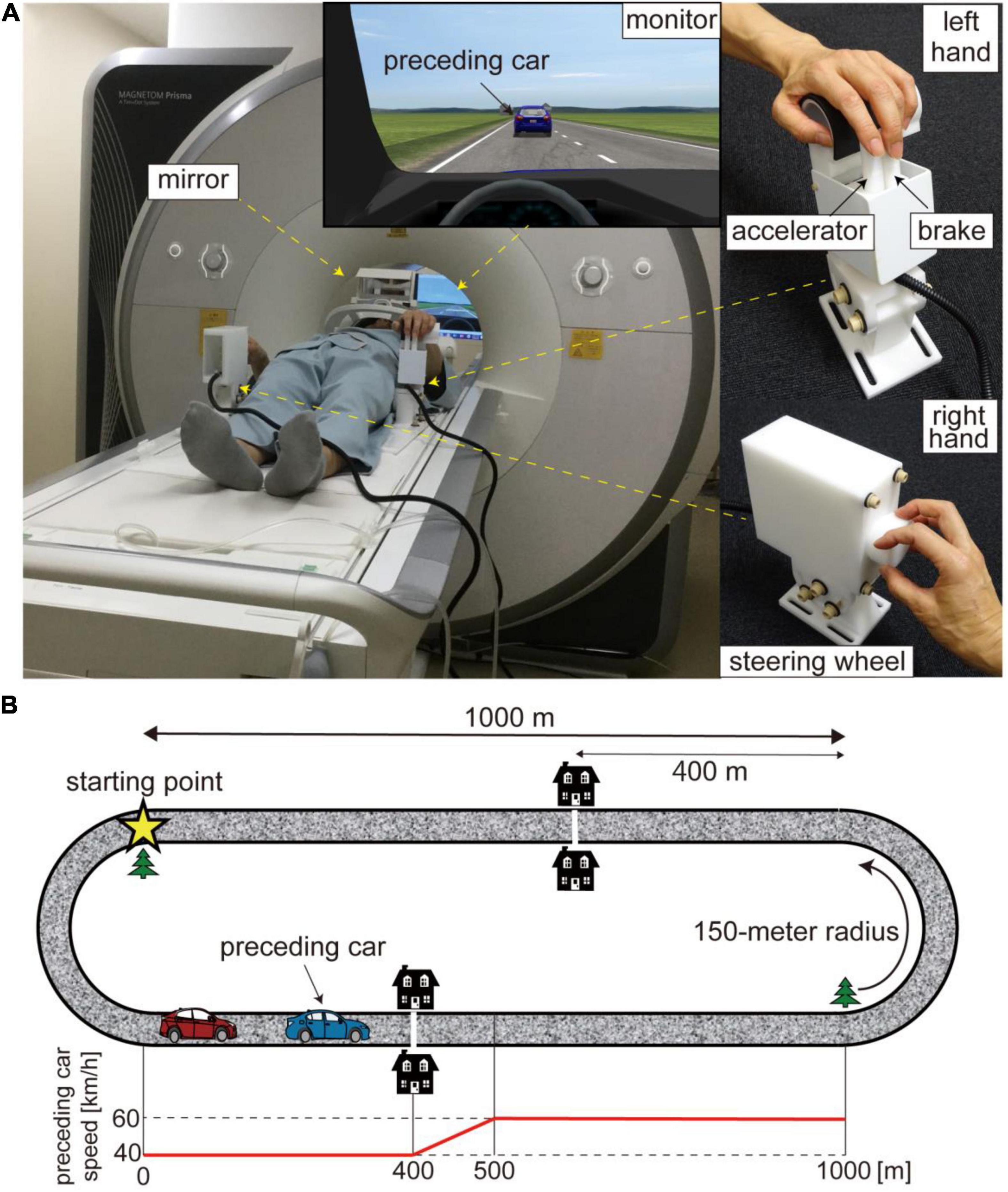
弊社の開発したMRIコンパチブルの車両コントロール装置(上図A参照)を用いた東京大学大学院人文社会系研究科研究員の大畑龍さんのトヨタ自動車株式会社との共同研究の研究成果がFrontiers in Human Neuroscience誌に掲載されました。
この研究ではfMRI装置の中でドライブシミュレーター(コース等上図B参照)を操作しているときの脳の状態を計測することにより運転中の脳の様々な神経活動を捉えることに成功しました。
自動車運転に特有の神経プロセスを解明することにより、より安全・快適な運転をサポートする車の開発に役立つことが期待されます。
今後も弊社は最先端の研究開発の支援を積極的に行って参ります。

弊社の猫にマナーを教える装置「マニャーdeシュ!」が日本テレビ「ネコいぬワイドショー」(2021年12月19日放送)で紹介されました。
以下の番組の宣伝動画の中でも紹介されていますので、ご覧頂けましたら幸いです。
総務省「異能vationプログラム」は、ICT分野において破壊的な地球規模の価値創造を生み出すために、大いなる可能性がある奇想天外でアンビシャスな技術課題への挑戦を支援するプログラムです。
この度、弊社の猫にマナーを教える装置「マニャーdeシュ!」が応募総数20,269件から選ばれた288件の一つとしてノミネートされました(競争倍率70倍)。
今回、自薦ではなく他薦でノミネートされたことに深く感謝致します。引き続き「マニャーdeシュ!」の改善・改良に精進致します。
「an・an」は毎年、昨今の猫ブームの火付け役となった「にゃんこ」特集を組んでいますが、その記念すべき2222(にゃ~にゃ~にゃ~にゃ~)号に弊社の「マニャーdeシュ!」が掲載されました。
愛猫に「厳しくもやさしくマニャーを教えてくれる」装置として紹介されています。お手にとってご覧頂けましたら幸いです。

この度、弊社で開発した猫にマナーを教える装置「マニャーdeシュ!」のクラウドファンディングをcampfireで開始しました。
https://camp-fire.jp/projects/view/293362
皆様からのご支援を何卒よろしくお願い致します。
弊社の猫にマナーを教える装置「マニャーdeシュ!」が日本テレビ「月曜から夜ふかし」(2019年6月10日放送)の中の「猫問題を調査した件」というコーナーで紹介されました。
番組で紹介された装置は研究開発用の試験バージョンのものです。
番組のロケで様々なフィールドでテストさせて頂いた結果、製品開発のために必要な情報を集めることが出来ました。
集めた情報を基に装置を改良し、製品向けの試作機を発表することが出来ました。誤認識も大幅に減らすことが出来るようになりました。
月曜から夜ふかしのスタッフの皆様に感謝申し上げます。
弊社の猫にマナーを教える装置「マニャーdeシュ!」がテレビ東京WBS(ワールドビジネスサテライト)のトレたまのコーナーで紹介されました(2019年6月5日放送)。
放送では角谷アナウンサーへの水の噴霧場面が強調されていましたが、本来は音声による警告によって乗ってはいけない場所を猫に理解させるための装置です。
音声による警告に従わなかった場合水が噴霧されるということを猫が一旦理解すれば、その後は音声による警告だけで猫が諦めてくれるようになるので、噴霧が日常的に行われるということは無いと考えられます。
今後さらに装置の改良を進めていく予定です。
弊社が実験装置制作のアドバイス並びに動作検証をさせて頂いたマツダ株式会社技術研究所先進ヒューマン・ビークル研究部門の岡本宜久さんの研究成果がIEEE/ASME Transactions on Mechatronics誌に掲載されました。
従来、運転時にハンドルにかかる負荷が脳に与える影響を正確に計測することは困難でした。
この研究では、脳の状態が正確に計測できるfMRI装置中で被験者が操作するハンドルにかかる負荷をコントロールできる装置を開発しました。
これにより、快適な運転を実現するために必要なハンドルへの適切なフィードバックの開発等が加速することが見込まれます。
今後も弊社は最先端の研究開発の支援を積極的に行って参ります。
弊社の猫除け装置「ニャンナウェイ®」が日本テレビ「月曜から夜ふかし」(2019年2月25日放送)の中の「様々な最先端を調査する」というコーナーで紹介されました。

ニャンナウェイ

水鉄砲を発射

水が嫌いな猫は寄り付かなくなる
番組中ではニャンナウェイが猫の写真には反応しますが、犬の写真・人間・タイガーマスクに扮した人物には反応しない様子が映っています。
残念ながら、豹コスチュームの岩井志麻子さんは猫として認識してしまいました。
ニャンナウェイに搭載されているAIは弊社代表取締役安田の執筆した本「オリジナルの画像認識AIを簡単に作ろう!」で紹介されているものと同じものです。
今後、豹人間を誤射してしまわないよう、さらなる技術革新に努めて参ります。